随着城市智能化进程加速,如何精准预测用户下一步可能访问的兴趣点(Point-of-Interest, POI)成为智慧出行、商业推荐等关键场景中的核心问题。传统方法在一定程度上利用深度学习或大语言模型(LLM)技术建模用户轨迹,但在用户意图建模、候选空间约束与结果可解释性等方面仍面临瓶颈。
近日,哈尔滨工业大学(深圳)廖清教授团队在SIGIR 2025国际顶级会议上成功发表题为《CoMaPOI: A Collaborative Multi-Agent Framework for Next POI Prediction Bridging the Gap Between Trajectory and Language》的最新研究成果。该工作由博士研究生钟林、汪林芝、杨旭与廖清教授共同完成,并得到国家重点研发计划(2020YFB2104003)、深圳市科技计划项目(ZDSYS20210623091809029)以及鹏城实验室重大专项(PCL2024A05)的资助支持。
本研究面向POI预测任务的两个关键挑战:一是用户轨迹信息理解不足,二是庞大无约束的候选空间难以直接处理。为此,团队提出了一种多智能体协作框架CoMaPOI,将复杂预测任务拆解为若干子任务,交由三类专职智能体高效协作完成。
方法设计如图1所示,CoMaPOI引入:Profiler智能体:利用工具集将用户历史轨迹转换为时空、频率等多维统计信息,并进一步抽象为可供LLM理解的用户长期偏好与近期出行模式,解决轨迹信息“难以理解”的问题;Forecaster智能体:借助检索增强生成(RAG)机制,在庞大的POI库中智能筛选出与用户偏好匹配的候选集合,并结合长期画像与短期模式进行双重重排序,显著压缩候选空间;Predictor智能体:整合用户画像、出行趋势与候选集合等信息,做出精准预测并输出推理理由,提升预测的准确性与可解释性。
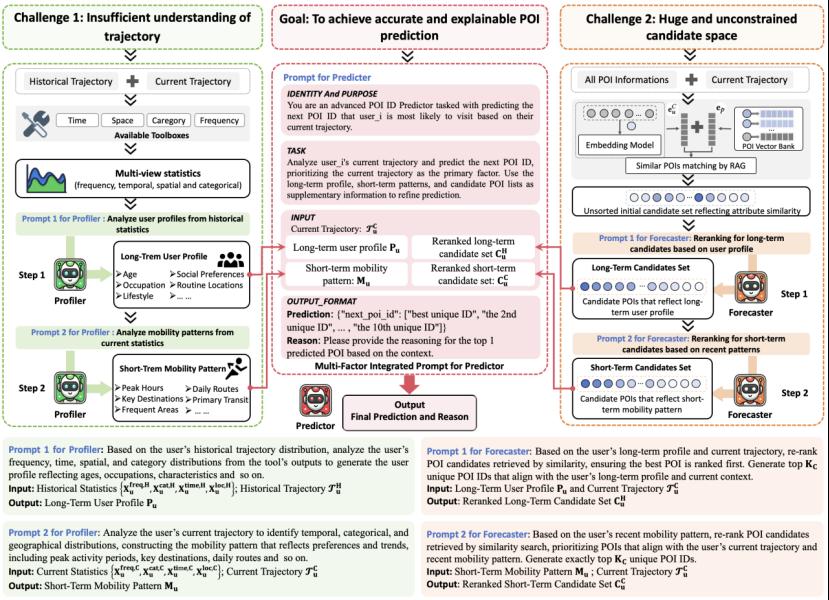
图1本研究提出的CoMaPOI多智能体框架
此外,团队还设计了逆向推理微调机制(RRF),通过逆向构造各智能体的最优输入与输出,从而提升模型的可迁移性与模块独立性。
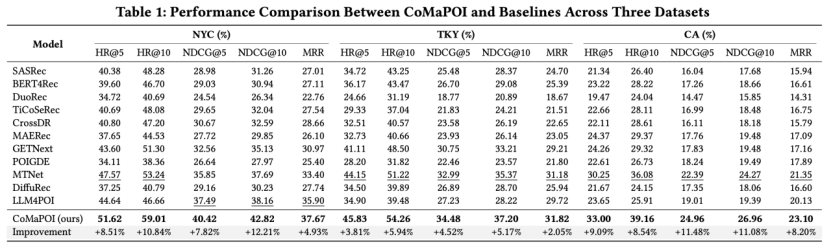
图2CoMaPOI与基线模型在三个数据集上的性能对比
图2展示了不同算法在三个公开POI数据集(NYC, TKY, CA)上的预测性能,CoMaPOI在HR@10、NDCG@10、MRR等多个指标上均显著优于现有最优基线方法(包括MTNet与LLM4POI),平均提升幅度在5%~10%之间,充分验证了该框架的有效性。本研究不仅拓展了大模型在城市轨迹预测中的应用边界,也为未来多智能体协同系统在智能推荐与出行导航等领域的推广应用提供了可行路径。
哈尔滨工业大学(深圳)廖清教授课题组长期聚焦于数据挖掘、信息安全、人工智能等研究方向,近年来已在NeurIPS、KDD、SIGIR、IEEE TKDE等国际顶级会议与期刊上发表论文逾百篇,课题组团队近年获国家科技进步奖二等奖及省部级科技奖励一等奖共7次,牵头或参与重点研发计划等省部级及以上科研项目10余项,促进了国家人工智能与计算机领域学科的发展。(审核 廖清)
